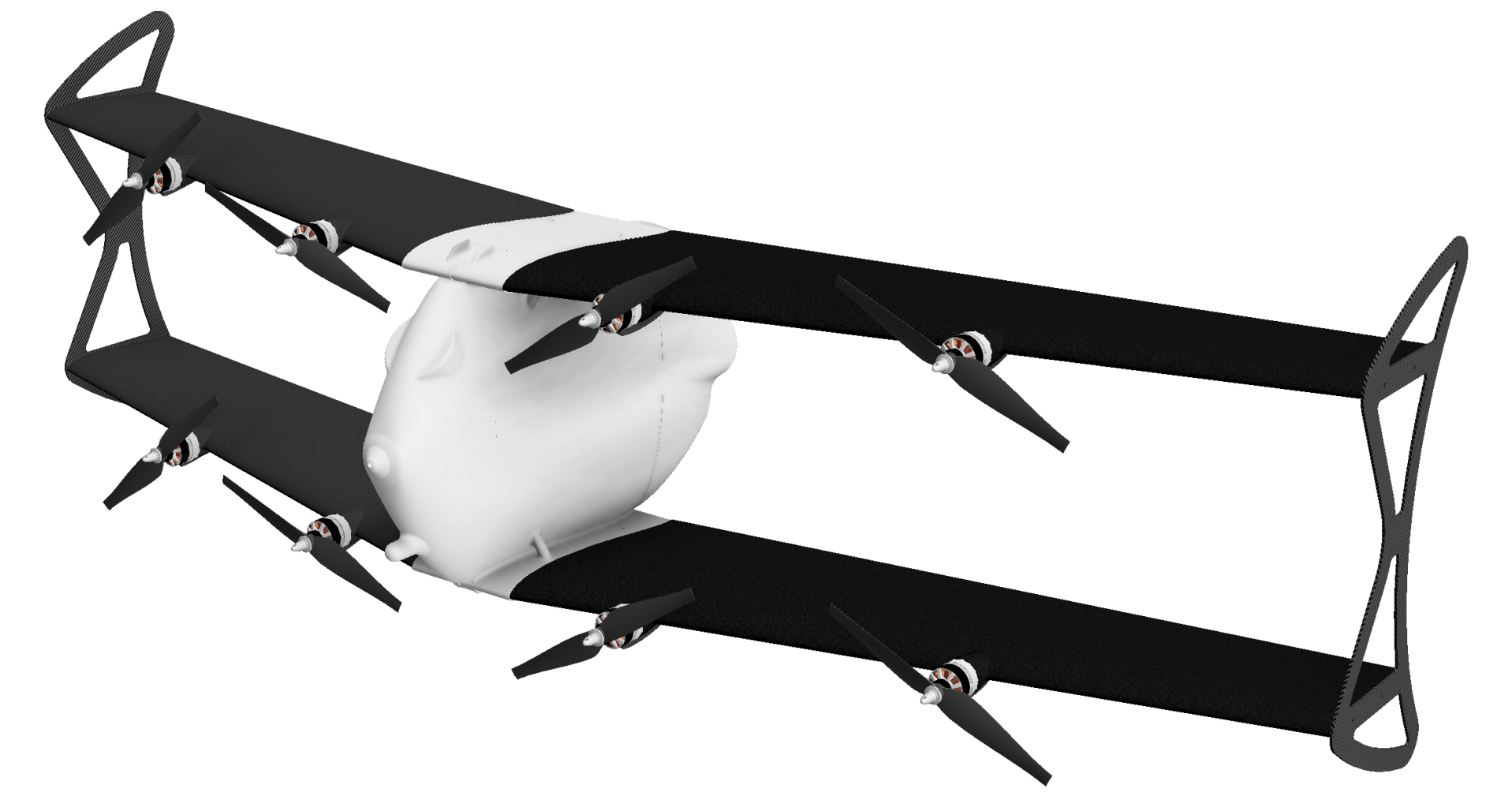
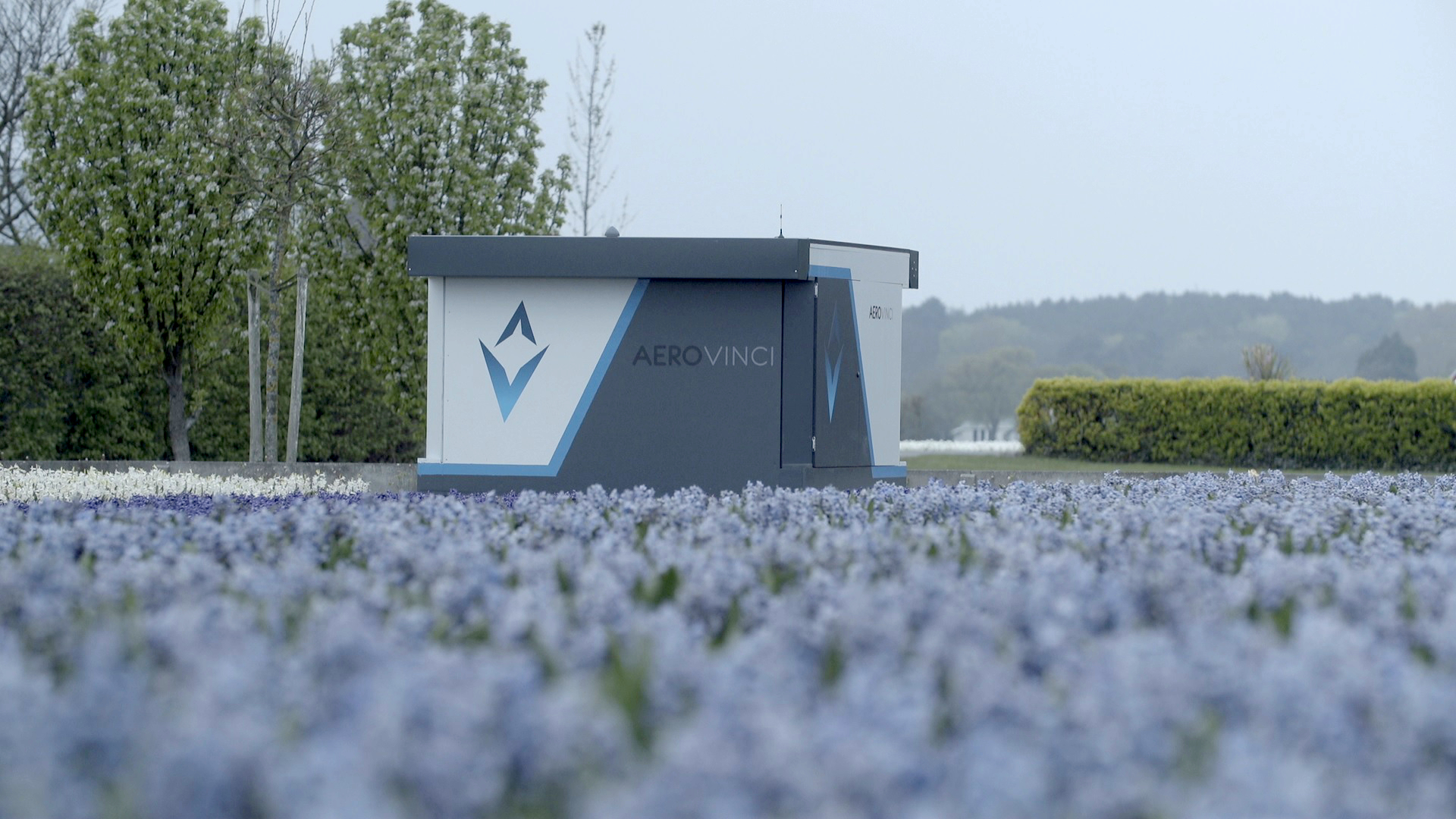
AeroVinci have developed a scalable drone system that includes a fully self-sustaining drone docking station (“DroneDock”), a PX4-powered VTOL vehicle (“Jack”), and seamless integration with major data collection systems. The system allows drones to land, recharge, process data, and transmit actionable information to end users. Other than routine maintenance, the entire operation requires no human interaction!

We were able to contact AeroVinci’s Deon Blaauw and ask a few questions about the system and their use of PX4.
Is there just one “Jack” vehicle in each DroneDock?
Yes (at least for now). To scale up the network users can simply add more nodes/docks.
How much ground can the DroneDock System Cover?
For agricultural applications there is relatively short data collection window around solar noon that can be used to get proper multi-spectral image data. Our initial tests indicate that a single DroneDock node will be able to cover 600 – 1200 acres within this time, depending on the types of images the system needs to gather (image overlap plays a role here, as does the quality of the ambient light/degree of cloud cover).
Other applications, e.g. security surveys, do not have the same small data-collection window. For these applications “Jack” will be able to cover a much larger area.
What data collection platforms do you support?
We’re already working closely with companies such as Birds.Ai and CropZoomer, and we hope to integrate with platforms like DroneDeploy and Precision Hawk.
We are also developing a simple API that will allow any third party data collection & processing platform to access the images gathered by our autonomous flying sensor network.
What happens in high wind?
DroneDock has an integrated weather station that is used by the system to determine whether or not it is safe to deploy. If the weather is bad, Jack stays inside the DroneDock. During landing, we have a patented drone catcher system to passively reduce wind and aid in autonomous landing.


What sorts of sensors/cameras does the system support?
We have developed a modular payload interface, so we are not locked into a single sensor!
At the moment we are using the SlantRange 3P sensor. We expect to have different sensors installed on drones operating in different countries, applications and crops (we are working closely with agronomists in order to determine which spectral bands/sensors work best in different cases).
Why did you select PX4 for flight stack?
We went through a process of comparing different flight stacks. Our study included numerous open-source as well as commercial options. We also considered to write our own flight-stack (members of our team worked at companies before where they developed DO-178 level B flight stacks from scratch).
We settled on PX4 for the following reasons:
- Modular architecture running on an RTOS
- Includes all the “house-keeping” modules we need, including data-logging, flight modes, telemetry handling
- Licensed under BSD so we can legally keep our company-specific modules separate
- Supports MAVLINK and already comes with a ground-station
- Very good software lifecycle and release management
- Good documentation
- Good community support
What work did you need to do to customise PX4?
It was extremely easy to work with PX4. The modular architecture allowed us to quickly and easily remove the current VTOL flight control code and replace it with our own proprietary flight controller.
PX4 does have some minor drawbacks, the fact that some flight control threads run in parallel using the publish / subscribe method means that sometimes an outerloop can run before an innerloop, but this is a minor issue and given our specific vehicle it does not present a major problem.
Is QGroundControl part of the solution?
Our end users don’t need QGroundControl because the system is fully autonomous! However we use a modified version internally for testing.
What’s Next for DroneDock?
We will soon have the ability to scale up a client network by adding new DroneDocks/Jacks (“nodes”). Eventually our vision is to create the “Internet of Drones”; a common network of flying sensors that everyone can share and that third parties can use to build their own applications.
Many thanks to AeroVinci for sharing a bit more about this excellent product! You can find out more on the website, and the video below.




{kind=link}